Exhibition Themes
展示テーマ
57 |
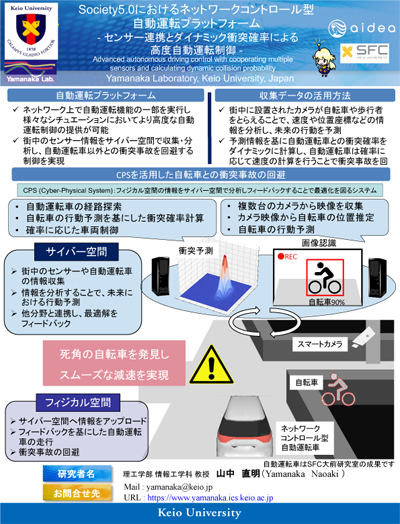
情報コミュニケーション 社会・インフラ Society 5.0におけるネットワークコントロール型
自動運転プラットフォーム ―センサー連携とダイナミック衝突確率による高度自動運転制御― |
|
Society5.0において自動運転技術の開発が求められており、衝突するなど秒単位での予測が必要になってきています。そこで交差点に設置している様々なセンサーを連携することで、衝突をダイナミックに予測します。また車両の旅行時間が短くなるような経路への変更も行います。
|
|