Exhibition Themes
57 |
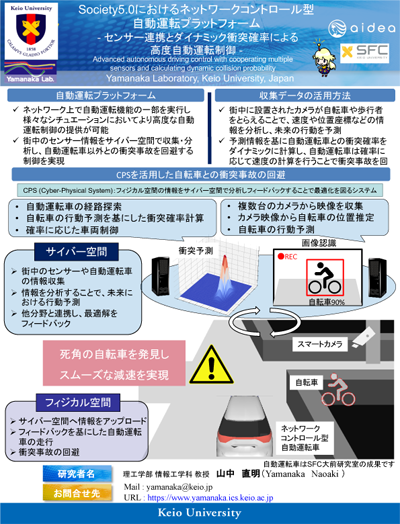
Information and Communication Society / Infrastructure Advanced autonomous driving control
with cooperating multiple sensors and calculating dynamic collision probability |
|
The development of autonomous driving vehicle (ADV) is required in Society 5.0, and to make predictions in seconds such as collision is necessary. Therefore, we propose a method of caluculating dynamic collision probability by linking multiple sensors. We also propose a method of changing route which is the shortest of all of the travel time.
|
|